Portfolio
Research & Projects
Motion planning work across single-agent and multi-agent systems — from research prototypes to production-oriented planners.
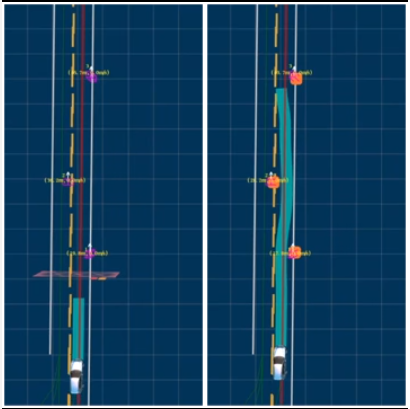
On-Road Motion Planner for Autonomous Vehicle
An efficient, robust, and real-time motion planning framework for on-road autonomous vehicles using HSL-RRT* and Nonlinear MPC for velocity optimization.
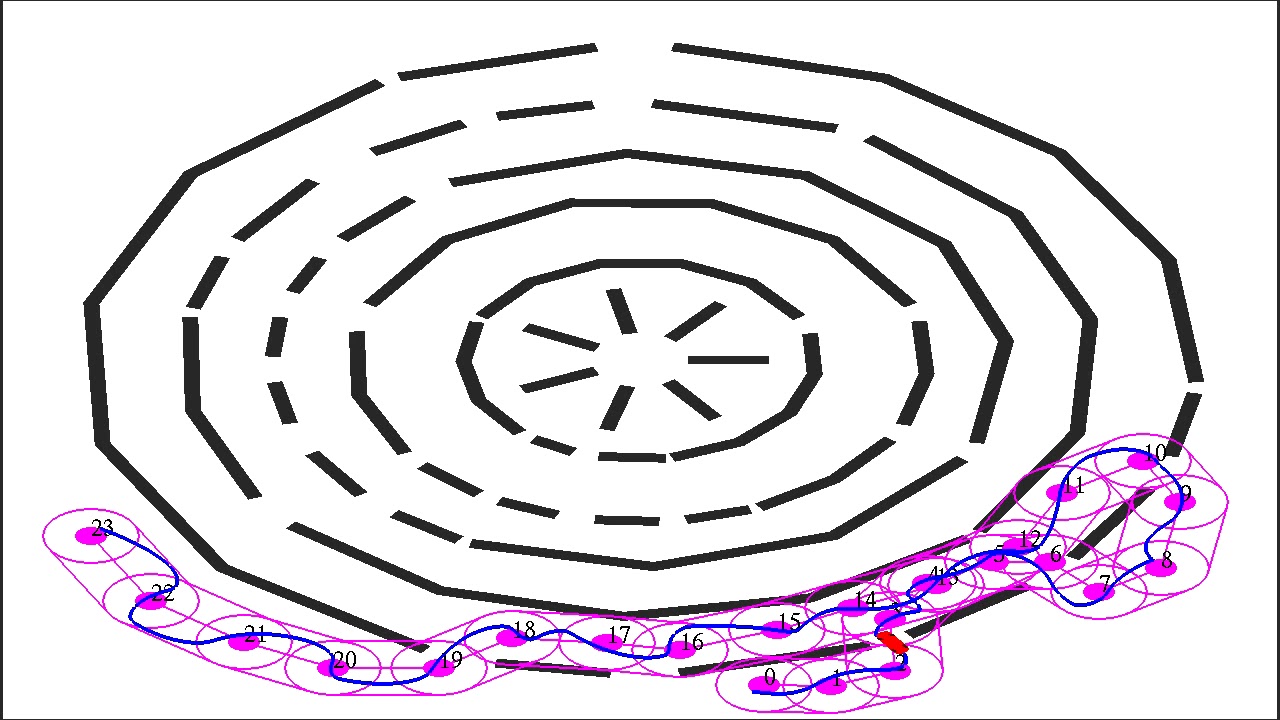
Waypoint Follow Motion Planner
A motion planning system for guiding robots along waypoint-based trajectories with predictive lookahead and cross-track error correction.
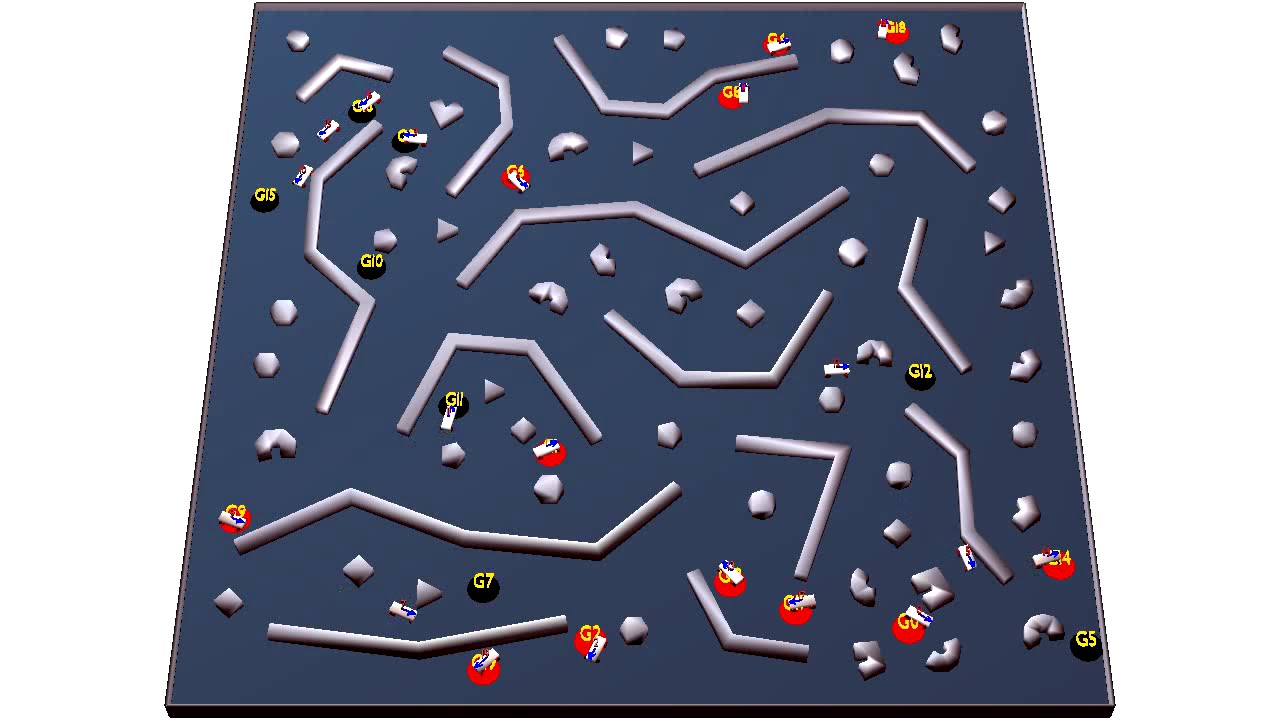
Multiple-Robots Motion Planner
Coordinated sampling-based expansion guided by multi-agent search to solve motion planning for multiple robots with dynamics constraints.
Combine Task and Motion Planner
INTERACT integrates sampling-based motion planning with PDDL action planning to generate collision-free, dynamically-feasible trajectories for pick-and-place tasks.

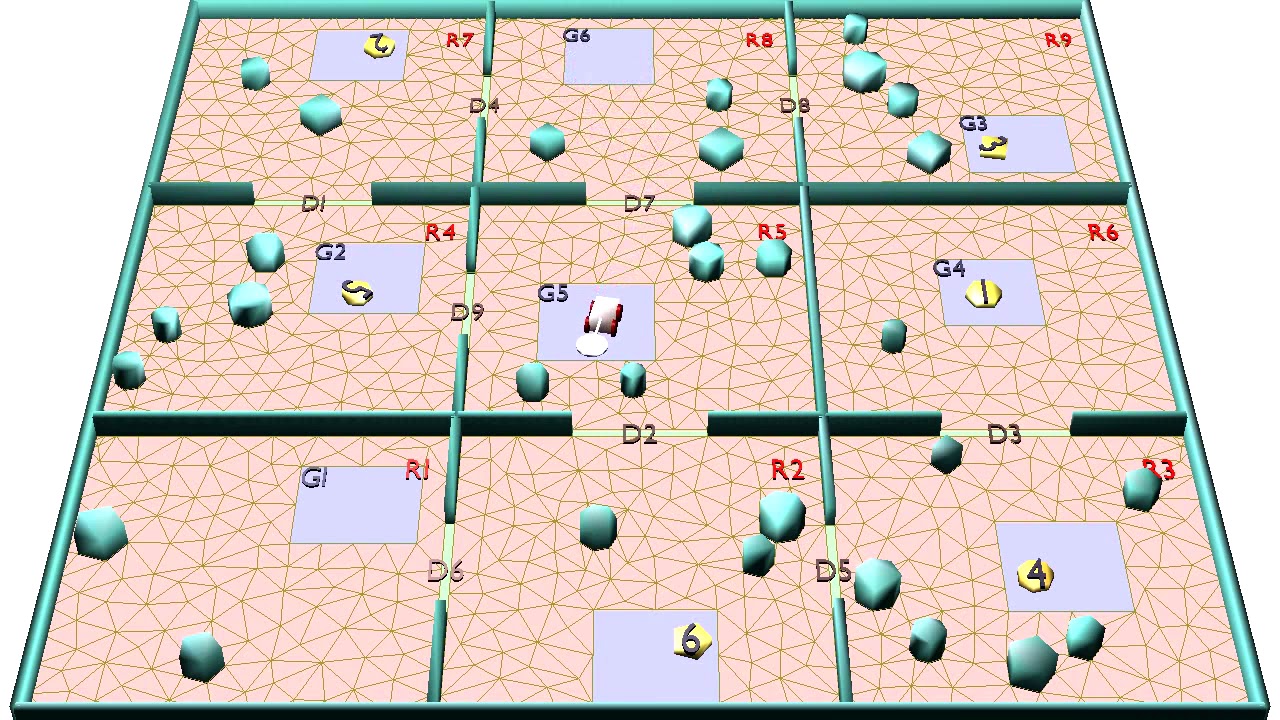
Guided Motion Planner with Physics
Sampling-based tree search guided by probabilistic roadmap abstractions to handle high-dimensional robots with nonlinear dynamics in complex environments.